 Get in touch
Get in touch

1. Introdução: Desconstruindo a potência do motor de indução CA O motor de indução AC é um dos m...
LEIA MAISNotícias da indústria
2025-09-23
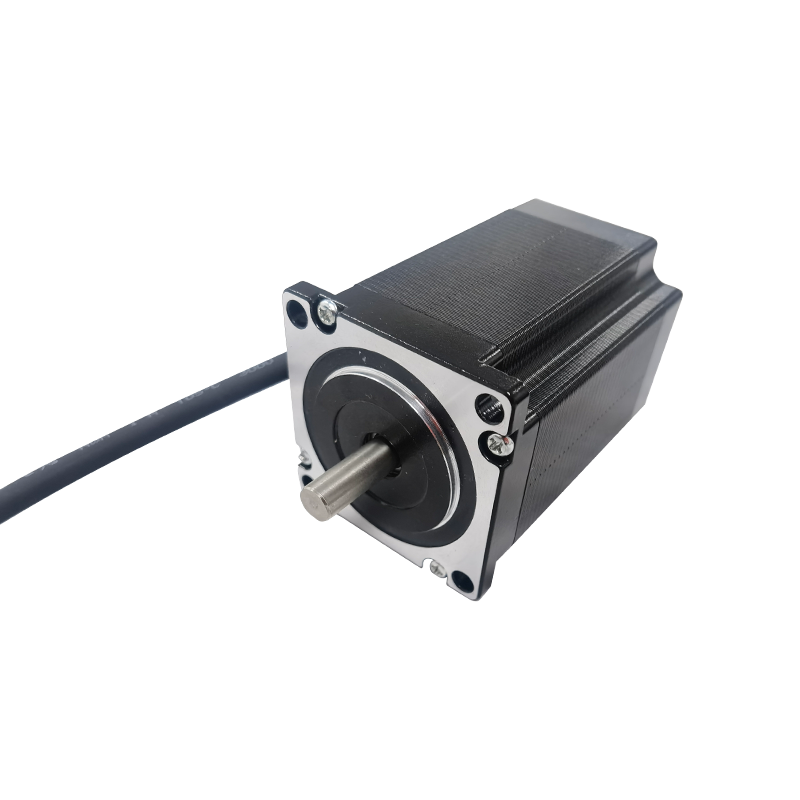
Os motores de passo representam a base do controle de movimento moderno, oferecendo posicionamento preciso e repetibilidade sem a necessidade de sistemas de feedback complexos. Esses motores elétricos síncronos e sem escovas convertem pulsos digitais em rotações mecânicas precisas do eixo, movendo-se em etapas discretas. Esta característica os torna indispensáveis em aplicações que vão desde eletrônicos de consumo até máquinas industriais sofisticadas. No entanto, queo as aplicações exigem não apenas precisão, mas também força significativa para mover cargas pesadas, superar o atrito ou manter a posição sob tensão, um motor de passo padrão pode ser insuficiente. É aqui que a categoria de motores de passo de alto torque torna-se crítico.
No contexto dos motores de passo, “alto torque” refere-se à capacidade do motor de gerar uma força rotacional superior em comparação com motores padrão de tamanho físico ou estrutura semelhante. O torque é a medida fundamental da força de um motor, determinando quanta carga ele pode acelerar, acionar e manter estacionário. A importância do alto torque não pode ser exagerada em aplicações exigentes. Por exemplo, na robótica, o torque elevado é essencial para atuadores articulados que devem suportar o peso de um braço robótico e sua carga útil. Na usinagem CNC, garante que a ferramenta de corte possa se mover com precisão através do material sem travar. Essencialmente, motores de passo de alto torque preenchem a lacuna entre a necessidade de precisão exata e a exigência de potência mecânica substancial , permitindo a inovação em campos que exigem ambos.
Para apreciar plenamente as vantagens dos motores de passo de alto torque, é necessário primeiro compreender os princípios básicos que regem todos os motores de passo. Ao contrário dos motores CC padrão que giram continuamente quando a tensão é aplicada, um motor de passo se move em incrementos angulares fixos conhecidos como passos. A estrutura interna do motor consiste em uma parte estacionária (o estator) com múltiplas bobinas eletromagnéticas e uma parte rotativa (o rotor) normalmente contendo ímãs permanentes ou um núcleo magneticamente permeável. Ao energizar as bobinas do estator em uma sequência específica, é criado um campo magnético que atrai o rotor, fazendo com que ele se alinhe com o campo e, assim, gire em um ângulo preciso a cada pulso recebido de um controlador.
Existem vários tipos fundamentais de motores de passo, cada um com características operacionais distintas. Motores de passo de ímã permanente (PM) apresentam um rotor com ímãs permanentes, proporcionando um bom torque de retenção e um ângulo de passo relativamente grande, mas geralmente oferecem resolução e torque mais baixos em comparação com outros tipos. Motores de passo de relutância variável (VR) ter um rotor de ferro macio que se alinhe com o caminho do campo magnético de menor relutância (resistência magnética); estes são menos comuns hoje. O tipo mais prevalente, especialmente em aplicações de alto desempenho, é o Motor de passo híbrido . Este projeto combina os princípios dos motores PM e VR, utilizando um rotor de ímã permanente com dentes que interagem com o estator eletromagnético dentado. Esta configuração híbrida permite ângulos de passo muito pequenos, alta saída de torque e excelente precisão posicional, tornando-o o projeto dominante para motor de passo de alto torque aplicações.
Vários termos-chave são essenciais para a compreensão das especificações do motor de passo. O ângulo de passo define a distância angular que o eixo gira com cada pulso único, geralmente 1,8° (200 passos/rotação) ou 0,9° (400 passos/rotação) para motores híbridos. Torque de retenção é o torque máximo que o motor pode exercer quando parado com seus enrolamentos energizados, que é uma classificação crítica para um motor de passo de alto torque pois indica sua capacidade de manter uma posição contra uma força externa. Por outro lado, torque de retenção é o torque presente quando os enrolamentos do motor não estão energizados, causado pela interação magnética entre o rotor de ímã permanente e o estator; isso fornece uma leve força de retenção passiva.
Em termos mecânicos, o torque é uma medida da força rotacional aplicada a um objeto. Para um motor de passo, é a força rotacional que o eixo do motor pode gerar para causar ou resistir ao movimento. É análogo ao conceito de força em um sistema linear. Alto torque, portanto, significa a capacidade de um motor de produzir uma forte força rotacional. Isto é fundamental para aplicações que envolvem aceleração de cargas pesadas, acionamento de mecanismos com alto atrito ou manutenção de posicionamento preciso sob pressão externa constante. É importante distinguir que um motor de passo de alto torque não é necessariamente uma categoria diferente de motor, mas sim uma designação para motores de passo projetados para fornecer valores de torque significativamente acima da linha de base padrão para seu tamanho de carcaça.
O torque em motores de passo é normalmente medido em Newton-metros (N·m) ou onças-polegadas (oz-in). A especificação de torque mais importante encontrada na folha de dados de um motor é a torque de retenção . Este é o torque máximo que o motor pode produzir parado quando suas bobinas estão totalmente energizadas. Serve como um indicador primário da força do motor. Outra representação crucial é a curva de torque , um gráfico que representa o torque disponível do motor em relação à sua velocidade de rotação. Esta curva é vital porque o torque de um motor de passo diminui à medida que sua velocidade aumenta devido aos efeitos da indutância e da EMF reversa. Compreendendo o velocidade do motor de passo vs torque Essa relação é essencial para selecionar um motor que funcione adequadamente em toda a faixa operacional necessária de uma aplicação, garantindo que ele não pare em velocidades mais altas.
A saída de torque de um motor de passo não é um valor fixo; é influenciado por vários fatores operacionais e de design. A corrente fornecida aos enrolamentos do motor é o acionador primário; corrente mais alta geralmente resulta em um campo magnético mais forte e, portanto, em um torque mais alto, até os limites de projeto do motor. A tensão de alimentação também desempenha um papel crítico, especialmente em velocidades mais elevadas. Uma tensão mais alta permite que a corrente mude de direção nos enrolamentos do motor mais rapidamente, ajudando a manter o torque em velocidades rotacionais aumentadas. O projeto físico do motor, incluindo a qualidade de seus materiais magnéticos, o número de dentes do estator e o entreferro entre o rotor e o estator, são todos projetados para maximizar a geração de torque. Por exemplo, um Motor de passo de alto torque NEMA 23 será projetado com esses fatores otimizados para fornecer mais torque do que um motor NEMA 23 padrão.
A principal vantagem de utilizar um motor de passo de alto torque é o aumento significativo na potência mecânica disponível para tarefas de controle de movimento. Essa capacidade aprimorada se traduz em vários benefícios importantes que são essenciais para o sucesso de aplicações exigentes. O benefício mais evidente é a capacidade de lidar com cargas inerciais maiores e superar atritos substanciais. Em sistemas como roteadores CNC ou correias transportadoras automatizadas, o motor não deve apenas mover o cabeçote da ferramenta ou a correia, mas também acelerar e desacelerar rapidamente a massa. Um motor com torque insuficiente iria parar ou perder passos sob tais demandas, enquanto um motor de passo de alto torque fornece a força necessária para garantir uma operação confiável, ampliando assim a gama de aplicações possíveis e melhorando a robustez das existentes.
Maior precisão e uma redução significativa nos erros de posição são outra grande vantagem. O alto torque de retenção A característica destes motores permite-lhes manter a sua posição rigidamente contra forças ou vibrações externas inesperadas. Isto é crucial em aplicações como montagem de precisão ou posicionamento de dispositivos médicos, onde mesmo um pequeno desvio pode levar à falha. Além disso, a substancial reserva de torque ajuda a evitar o travamento, que é uma causa comum de perda de passos. As etapas perdidas ocorrem quando o motor não consegue executar um movimento comandado, levando a um erro posicional acumulado que o sistema de malha aberta não consegue detectar. Operando bem dentro de sua capacidade de torque, um motor de passo de alto torque minimiza bastante esse risco, garantindo que a posição real da máquina sempre corresponda à posição pretendida comandada pelo controlador.
Finalmente, estes motores oferecem maior flexibilidade de design e longevidade. Os engenheiros não são forçados a levar um motor aos seus limites operacionais, o que muitas vezes leva ao superaquecimento e à redução da vida útil. Em vez disso, eles podem selecionar um motor de passo de alto torque que opera de forma eficiente e tranquila dentro de seu envelope de desempenho. Esse espaço livre também permite que os sistemas lidem com cargas variáveis ou obstruções inesperadas de maneira mais elegante, sem falhas catastróficas. A capacidade de usar uma estrutura de motor mais compacta, como um Motor de passo de alto torque NEMA 23 , para alcançar o desempenho que de outra forma exigiria uma estrutura maior e mais pesada, é um benefício direto desta tecnologia, permitindo projetos mecânicos mais simplificados e eficientes.
A combinação única de precisão, confiabilidade e potência torna motor de passo de alto torques adequado para uma vasta gama de aplicações em vários setores. Sua capacidade de fornecer movimento controlado em etapas discretas, sem sensores de feedback, simplifica o projeto do sistema e, ao mesmo tempo, garante a precisão.
No campo de Robótica , esses motores são os atuadores preferidos para movimentação articular, particularmente em braços robóticos que deve lidar com cargas pesadas. O motor de passo de alto torque for robotics fornece a força necessária para articular membros e garras com precisão enquanto suporta o peso do próprio braço e do objeto que carrega. Isto é essencial para tarefas que vão desde montagem industrial e soldagem até automação laboratorial complexa. O torque de retenção garante que o braço possa manter sua posição sem desviar, mesmo quando ligado, mas não em movimento.
Máquinas CNC representam uma aplicação clássica onde a precisão e a potência não são negociáveis. Um motor de passo para roteador CNC as aplicações devem mover a ferramenta de corte através de materiais como metal, madeira ou plástico, encontrando resistência significativa. O motor de passo de alto torque garante que o percurso da ferramenta seja seguido com precisão sem travamento, o que danificaria a peça de trabalho e potencialmente danificaria a máquina. Os mesmos princípios se aplicam a outros equipamentos CNC, como tornos, cortadores a plasma e cortadores a laser, onde o desempenho consistente é fundamental para a qualidade e a produtividade.
O mundo de Impressão 3D depende fortemente de motores de passo para movimento do eixo e extrusão de filamentos. À medida que as impressoras aumentam em tamanho e velocidade, e à medida que materiais como ABS e náilon exigem mais força para passar pela extrusora, a demanda por torque aumenta. Um motor de passo para impressoras 3D de alto torque garante o alinhamento preciso da camada, evitando etapas perdidas nos eixos X, Y e Z, enquanto um motor extrusor de alto torque fornece fluxo de filamento consistente, levando a maior qualidade de impressão e confiabilidade.
Automação Industrial é um domínio amplo onde esses motores são onipresentes. Eles acionam sistemas transportadores em máquinas de embalagem , acionar válvulas e posicionar componentes em máquinas de pegar e colocar . Nestes ambientes, a durabilidade e a operação contínua são fundamentais. O uso de um motor de passo industrial de alto torque garante confiabilidade a longo prazo e a capacidade de executar tarefas repetitivas com alta precisão, milhões de vezes. Para ambientes agressivos, opções como um Motor de passo de alto torque IP65 ou mesmo um Motor de passo externo com classificação IP67 estão disponíveis para resistir à entrada de poeira e umidade.
Equipamento Médico exige os mais altos níveis de precisão, limpeza e confiabilidade. Motores de passo de alto torque são usados em dispositivos como analisadores automatizados, bombas de infusão, robôs cirúrgicos e equipamentos de imagem. Seu movimento preciso controla o manuseio de amostras, a distribuição de dosagem e o posicionamento de sensores e ferramentas. Em muitos casos, um motor de passo de baixo ruído para automação de laboratório ou uso médico é especificado para garantir um ambiente operacional silencioso. A natureza previsível da operação do motor de passo, combinada com o alto torque, os torna ideais para essas aplicações sensíveis.
Além destes, aplicações especializadas estão surgindo continuamente. Eles são usados em atuadores automotivos para ajuste do espelho e controle do acelerador, em máquinas de impressão para alimentação precisa de papel e em sistemas de energia renovável, como motor de passo de rastreador solar de alto torque unidades que ajustam os painéis para seguir o sol e em controle de passo de turbina eólica mecanismos.
Selecionando o apropriado motor de passo de alto torque para uma aplicação específica requer uma avaliação sistemática de vários parâmetros-chave. Uma escolha errada pode levar a um desempenho ruim, parada do motor, superaquecimento ou falha prematura.
A etapa mais crítica é determinar com precisão os requisitos de torque da aplicação. Isto envolve calcular o torque necessário para acelerar a inércia da carga e superar quaisquer forças contínuas, como atrito ou gravidade. O motor deve fornecer torque que exceda o pico de torque exigido pela aplicação em toda a faixa de velocidade operacional, conforme definido pelo velocidade do motor de passo vs torque curva. É uma prática recomendada incluir uma margem de segurança de 30 a 50% acima do requisito calculado para levar em conta variáveis imprevistas, como alterações de atrito ou tolerâncias de fabricação. Consultando um gráfico de torque do motor de passo para um motor candidato é essencial verificar se sua curva de torque atende às demandas da aplicação em velocidades baixas e altas.
O tamanho físico do motor, muitas vezes padronizado por NEMA tamanhos de quadro (por exemplo, NEMA 17, NEMA 23, NEMA 34), fornece uma indicação geral de sua capacidade de potência. Um Motor de passo de alto torque NEMA 23 normalmente fornecerá mais torque do que um motor NEMA 17, enquanto um motor de passo de estrutura grande como um NEMA 34 será capaz de produzir torque ainda maior. Contudo, o tamanho do quadro por si só não é um indicador perfeito; o design interno e a qualidade dos materiais influenciam muito o torque real. A seleção deve equilibrar o requisito de torque com o espaço disponível e as restrições de montagem dentro da máquina.
A correspondência das especificações elétricas do motor com o driver e a fonte de alimentação é crucial para atingir o desempenho nominal. O motor classificação atual é a corrente máxima por fase que ela pode suportar sem superaquecimento. O driver deve ser capaz de fornecer esta corrente. O fornecimento tensão é igualmente importante. Uma tensão mais alta permite que a corrente aumente rapidamente nos enrolamentos do motor, o que é necessário para manter o torque em velocidades mais altas. Operar um motor com uma fonte de alimentação com tensão muito baixa resultará em uma rápida queda do torque à medida que a velocidade aumenta, um fenômeno claramente visível na curva de torque do motor.
O ângulo de passo determina a resolução intrínseca do motor. Um motor padrão de 1,8° fornece 200 passos por revolução, enquanto um motor de 0,9° fornece 400 passos. Para aplicações que exigem um controle posicional muito preciso, um ângulo de passo menor ou o uso de um driver capaz de micropasso é vantajoso. É importante lembrar que embora o micropasso aumente a resolução, ele não aumenta significativamente a precisão; o torque produzido em uma posição de micropasso é menor do que em uma posição de passo completo.
O operating environment must be considered to ensure reliability. Factors such as ambient temperature, presence of contaminants like dust or moisture, and exposure to vibrations can impact motor selection. For example, in a wash-down environment or an outdoor application, an Motor de passo de alto torque IP65 ou superior seria necessária para evitar danos. Altas temperaturas ambientes podem exigir a redução da capacidade do motor (usando-o abaixo da especificação de torque máximo) para evitar superaquecimento ou selecionando um motor com uma classe de temperatura mais alta.
Selecionar um modelo específico entre a vasta gama de disponíveis motor de passo de alto torques pode ser assustador. A visão geral a seguir apresenta uma variedade de produtos categorizados por seus pontos fortes de aplicação típicos, destacando os principais recursos sem fazer referência a nomes de marcas específicas. Esta lista ilustra a diversidade disponível para engenheiros e designers.
Motor de passo de alto torque NEMA 17: Este motor compacto é um carro-chefe em aplicações onde o espaço é limitado, mas o desempenho não pode ser comprometido. É excepcionalmente popular em high-end Impressão 3D e automação em pequena escala. As versões modernas oferecem valores de torque que rivalizam com modelos maiores e mais antigos, tornando-os ideais para instrumentos de precisão e compactos. robótica articulações.
Motor de passo de alto torque NEMA 23: Indiscutivelmente o tamanho de estrutura mais comum para aplicações exigentes de bancada, o Motor de passo de alto torque NEMA 23 fornece um excelente equilíbrio entre tamanho, potência e custo. É a escolha certa para Roteadores CNC , pequenas fresadoras e maiores Impressoras 3D . Sua versatilidade o torna adequado para uma ampla gama de automação industrial tarefas.
Motor de passo de alto torque NEMA 34: Quando for necessária uma potência substancial, este motor de passo de estrutura grande é o próximo passo. Ele é projetado para serviços pesados CNC máquinas, pórticos industriais e sistemas de automação que devem movimentar cargas significativas. Esses motores são essenciais para aplicações onde é necessária alta força de empuxo, como em grandes formatos máquinas de impressão .
Motor de passo engrenado: Este tipo integra uma caixa de engrenagens planetárias com padrão motor de passo híbrido . A redução da engrenagem multiplica significativamente o torque de saída enquanto diminui a velocidade de saída, criando um excepcional motor de alto torque de baixa rotação . Isto é ideal para aplicações como acionamentos de transportadores, atuadores de válvulas e qualquer sistema que exija alta força em velocidades lentas e controladas.
Motor de passo à prova d'água (IP65/IP67): Projetado para ambientes agressivos, um Motor de passo de alto torque IP65 é à prova de poeira e protegido contra jatos de água, tornando-o adequado para processamento de alimentos e bebidas, máquinas de embalagem e aplicações externas. Um Motor de passo externo com classificação IP67 oferece ainda maior proteção contra imersão temporária, perfeita para rastreador solar sistemas ou equipamentos agrícolas.
Motor de passo de alto torque em circuito fechado: Este sistema avançado combina um motor de passo de alto torque com um codificador integrado. O codificador fornece feedback em tempo real para um driver especializado, criando um circuito fechado sistema que pode detectar e corrigir etapas perdidas. Esta tecnologia oferece a simplicidade de um motor de passo com a confiabilidade e o desempenho de alta velocidade de um servo, ideal para aplicações de missão crítica. equipamento médico e alto rendimento máquinas de pegar e colocar .
Motor de passo de alto torque com codificador e redutor integrados: Isto representa uma solução altamente projetada que reúne um motor, um redutor para multiplicação de torque e um codificador para feedback de posição em uma única unidade. Isto motor com codificador e redutor integrados simplifica o projeto e a instalação para tarefas de movimento complexas, fornecendo alto torque, baixa velocidade e garantia de controle em um pacote compacto para aplicações como braços robóticos and atuadores automotivos .
Motor de passo de ultraprecisão: Ose motors are engineered for applications requiring the utmost accuracy and smoothness, such as in dispositivo médico fabricação ou automação de laboratório. Eles geralmente apresentam ângulos de passo muito finos e são otimizados para vibração e ruído mínimos, qualificando-se como um motor de passo de baixo ruído para automação de laboratório .
Motor de passo certificado para indústrias regulamentadas: Os motores usados em equipamentos médicos, aeroespaciais ou públicos geralmente exigem certificações formais. Um motor de passo com certificações CE / UL / RoHS demonstra conformidade com os padrões internacionais de segurança, meio ambiente e compatibilidade eletromagnética, o que é um pré-requisito para muitos dispositivo médico e aplicativos voltados para o consumidor.
Motor de passo híbrido de alto torque personalizado: Para aplicações com restrições mecânicas, elétricas ou ambientais exclusivas, um motor de passo híbrido de alto torque personalizado pode ser a única solução. Os fornecedores podem modificar projetos padrão com tamanhos de eixo , conectores, enrolamentos, revestimentos ou materiais magnéticos para atender aos requisitos exatos de desempenho e fator de forma.
Alcançar o desempenho avaliado de um motor de passo de alto torque depende inteiramente de emparelhá-lo com a eletrônica de acionamento correta. O próprio motor é um dispositivo passivo; o driver e a fonte de alimentação determinam a eficácia com que ele converte energia elétrica em movimento mecânico.
Drivers de motor de passo são o elo crítico entre um sinal de controle e o motor. Eles pegam pulsos de passo e direção de baixa potência de um controlador de movimento e os traduzem na corrente de alta potência necessária para acionar os enrolamentos do motor. Para motor de passo de alto torques , a escolha da tecnologia do driver é fundamental. Os drivers básicos operam em modos de passo completo ou meio passo, o que pode ser suficiente para algumas aplicações, mas geralmente leva a vibrações perceptíveis. Drivers de micropasso são altamente recomendados. Eles dividem eletronicamente cada passo completo em micropassos menores, resultando em movimentos significativamente mais suaves, ruído audível reduzido e estabilidade aprimorada em baixa velocidade. A capacidade de um driver fornecer uma corrente consistente é vital para manter o torque, especialmente em velocidades mais altas.
Fontes de alimentação deve ser selecionado com cuidado. A tensão da fonte de alimentação deve ser significativamente maior que a tensão nominal do motor para superar o contra-EMF gerado em velocidade. Uma regra prática comum é usar uma tensão de alimentação de 5 a 20 vezes a tensão nominal do motor, desde que a tensão nominal máxima do driver não seja excedida. A fonte de alimentação também deve ser capaz de fornecer a corrente exigida pelo motor. A corrente nominal (em Amps) da alimentação deve ser pelo menos igual à soma da corrente exigida por todos os motores acionados, embora seja aconselhável uma margem para demandas de pico.
Sinais de controle são os comandos digitais que ditam o movimento. A grande maioria dos drivers de passo modernos usa uma interface simples de dois sinais: STEP e DIRECTION. Cada pulso na linha STEP comanda o motor para mover um incremento (um passo ou micropasso). A frequência desses pulsos determina a velocidade do motor. O nível (alto ou baixo) na linha DIRECTION determina a direção de rotação. Essa simplicidade faz com que o controle de um motor de passo de alto torque simples para microcontroladores e PLCs.
Fiação e conexões devem ser executados corretamente para garantir confiabilidade e evitar danos. A utilização de fios de bitola adequada é essencial para lidar com a corrente do motor sem queda excessiva de tensão ou aquecimento. As conexões com o driver devem ser seguras e é uma boa prática usar cabos blindados para os sinais de PASSO e DIREÇÃO para protegê-los contra ruídos elétricos, que podem causar comportamento errático do motor. O aterramento adequado do driver, da fonte de alimentação e da estrutura do motor também é fundamental para uma operação estável.
Mesmo com uma seleção adequada motor de passo de alto torque e sistema de acionamento, podem surgir problemas durante a operação. Compreender as causas raízes dos problemas comuns é essencial para manter a confiabilidade e o desempenho do sistema.
Motor parado é um dos problemas mais frequentes. Ocorre quando o torque exigido pela carga excede o torque que o motor pode produzir a uma determinada velocidade. A principal causa é uma correspondência incorreta entre a capacidade do motor e os requisitos da aplicação, muitas vezes revelada pelo velocidade do motor de passo vs torque curva. A paralisação também pode ser causada por fornecimento elétrico insuficiente. Uma fonte de alimentação subdimensionada que não consegue fornecer a tensão adequada causará uma rápida queda de torque à medida que a velocidade aumenta. Da mesma forma, um driver definido para um limite de corrente abaixo da classificação do motor impedirá que o motor gere seu torque total. As soluções incluem recalcular os requisitos de torque com uma margem de segurança maior, selecionar um motor com uma curva de torque mais alta, aumentar a tensão de alimentação dentro dos limites do driver ou configurar corretamente a saída de corrente do driver.
Superaquecimento é uma característica natural dos motores de passo, pois eles consomem corrente mesmo quando estão parados. No entanto, o calor excessivo pode degradar o isolamento e encurtar o ciclo de vida do motor de passo . A causa mais comum é operar o motor em sua corrente nominal máxima ou próximo dela por longos períodos. Usar corrente excessiva para obter mais torque do que o motor foi projetado gerará calor. Outras causas incluem uma alta taxa de passos em baixas velocidades onde a produção de torque é alta ou resfriamento inadequado no ambiente de aplicação. Para mitigar o superaquecimento, certifique-se de que a corrente do driver esteja ajustada adequadamente – geralmente para a corrente nominal do motor – e não desnecessariamente alta. Melhorar o fluxo de ar ao redor do motor ou adicionar um dissipador de calor pode ser eficaz. Para aplicações de serviço contínuo que exigem alto torque, selecionar um motor com uma classificação de torque mais alta do que o estritamente necessário permitirá que ele funcione mais frio.
Vibração e Ruído são inerentes à natureza de passo discreto dos motores de passo, mas podem se tornar problemáticos em aplicações de precisão. Esses problemas são mais pronunciados em baixas velocidades e nas frequências ressonantes do motor. A vibração pode levar ao desgaste mecânico prematuro e reduzir a precisão do posicionamento em sistemas sensíveis. A principal solução é o uso de micropasso drivers, que suavizam o movimento entre etapas completas, reduzindo significativamente a vibração e o ruído audível. Mecanicamente, garantir que o motor esteja montado com segurança e devidamente acoplado à carga pode amortecer as vibrações. Se a ressonância em velocidades específicas for um problema, o sistema de controle pode ser programado para acelerar rapidamente através dessas velocidades, em vez de operar de forma constante dentro delas.
Posicionamento impreciso em um sistema passo a passo de malha aberta quase sempre indica passos perdidos. Isto acontece quando o motor não consegue se mover para uma posição comandada porque o torque da carga excedeu o torque disponível do motor. O sistema não tem conhecimento do erro, levando a um desvio posicional acumulado. A causa raiz geralmente é o torque insuficiente, semelhante ao travamento. No entanto, também pode ser causado por cargas de choque repentinas ou taxas de aceleração excessivas que exigem torque instantâneo além da capacidade do motor. Para evitar imprecisões, a seleção inicial do motor deve ser verificada em relação à curva de torque. Para aplicações onde as etapas perdidas são inaceitáveis, a solução mais robusta é fazer a transição para um motor de passo de alto torque em circuito fechado sistema. Este sistema utiliza um codificador para monitorar a posição e corrigirá automaticamente quaisquer passos perdidos, garantindo a precisão de um passo a passo com a confiabilidade de um servo.
O field of motor de passo de alto torques não é estático; está evoluindo para atender às demandas de automação e engenharia de precisão cada vez mais sofisticadas. Várias tendências importantes estão moldando seu desenvolvimento futuro.
Avanços em materiais e design de motores estão levando a melhorias contínuas na densidade de potência. O uso de ímãs permanentes de alta qualidade, como o neodímio, e aços de laminação aprimorados para os núcleos do estator e do rotor, permite que os fabricantes extraiam mais torque de um determinado tamanho de carcaça. Esta tendência à miniaturização sem sacrificar o desempenho permite o projeto de máquinas mais compactas e potentes. A pesquisa de novos materiais magnéticos e geometrias eletromagnéticas otimizadas promete ganhos adicionais em eficiência e produção de torque.
Integração com sistemas de controle avançados é uma tendência dominante, em grande parte impulsionada pela crescente adoção de circuito fechado tecnologia. A distinção entre sistemas de passo e servo está se confundindo à medida que motor de passo com codificador as soluções tornam-se mais económicas e generalizadas. Os futuros drivers contarão com algoritmos mais sofisticados que não apenas corrigem erros de posição, mas também amortecem ativamente as vibrações e otimizam o consumo de corrente em tempo real com base na carga. Este controle inteligente maximiza o torque do motor disponível enquanto melhora a suavidade e a eficiência.
O crescente demanda por motores de alto torque com eficiência energética está influenciando as prioridades de design. À medida que a sustentabilidade se torna uma preocupação central da engenharia, há um esforço para reduzir o consumo de energia inerente aos motores de passo, que normalmente consomem corrente total mesmo quando parados. Estão surgindo novas tecnologias de driver que podem reduzir dinamicamente a corrente do motor quando totalmente torque de retenção não é necessário, reduzindo significativamente o uso de energia e a geração de calor sem comprometer o desempenho. Isto é particularmente importante para aplicações operadas por bateria e instalações industriais de grande escala onde os custos de energia são significativos.
Motores de passo de alto torque são uma tecnologia capacitadora crítica para um vasto espectro de aplicações modernas que exigem uma combinação de controle de posição preciso e força mecânica substancial. Das articulações articuladas de braços robóticos aos impulsos poderosos de Roteadores CNC e os atuadores confiáveis em equipamento médico , esses motores fornecem uma solução exclusiva que equilibra desempenho, simplicidade e economia.
O effective selection and use of a motor de passo de alto torque depende de um entendimento completo dos requisitos da aplicação, especialmente do torque necessário em toda a faixa de velocidade operacional. É essencial considerar cuidadosamente fatores como tamanho do motor, especificações elétricas e condições ambientais. Além disso, é impossível alcançar o desempenho ideal sem emparelhar o motor com um driver e uma fonte de alimentação corretamente combinados.
1. Introdução: Desconstruindo a potência do motor de indução CA O motor de indução AC é um dos m...
LEIA MAIS1. Introdução Na automação industrial moderna, construção de data centers, atualização de eletrônicos de consumo...
LEIA MAISOs motores de passo representam a base do controle de movimento moderno, oferecendo posicionamento e re...
LEIA MAISO panorama motorizado industrial está passando por uma transformação significativa, impulsionada pela implacável ...
LEIA MAISProdutos Relacionados
Edifício 10, No.199, Jinfeng Road, Suzhou High-tech, província de Jiangsu, China
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Direitos autorais © Tecnologia elétrica Co. de Suzhou Retek, Ltd. Todos os direitos reservados. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













