 Get in touch
Get in touch

1. Introdução: Desconstruindo a potência do motor de indução CA O motor de indução AC é um dos m...
LEIA MAISNotícias da indústria
2026-04-21
Um motor DC (corrente contínua) converte energia elétrica em rotação mecânica usando a interação entre um campo magnético e um condutor que transporta corrente. O princípio de funcionamento segue a lei da força de Lorentz: quando a corrente elétrica flui através de um condutor colocado dentro de um campo magnético, o condutor experimenta uma força perpendicular tanto à direção da corrente quanto à direção do campo. Organize condutores condutores de corrente suficientes em um conjunto rotativo e essa força se tornará um torque rotacional contínuo.
Em termos práticos, um motor DC contém dois sistemas magnéticos fundamentais. O estator fornece um campo magnético estacionário – seja de ímãs permanentes ou eletroímãs (enrolamentos de campo). O rotor (também chamada de armadura) transporta condutores conectados a uma fonte de alimentação CC externa. A corrente que flui através dos condutores do rotor reage com o campo do estator para gerar torque, girando o rotor. Enquanto a tensão CC for aplicada, o motor continuará girando.
A velocidade em um motor CC é controlada principalmente pela tensão aplicada: uma tensão mais alta produz uma rotação mais rápida. A saída de torque é proporcional à corrente da armadura. Essa relação direta entre tensão, corrente, velocidade e torque torna os motores CC excepcionalmente fáceis de controlar em uma ampla faixa operacional — uma propriedade que explica seu domínio contínuo em aplicações de acionamento de velocidade variável.
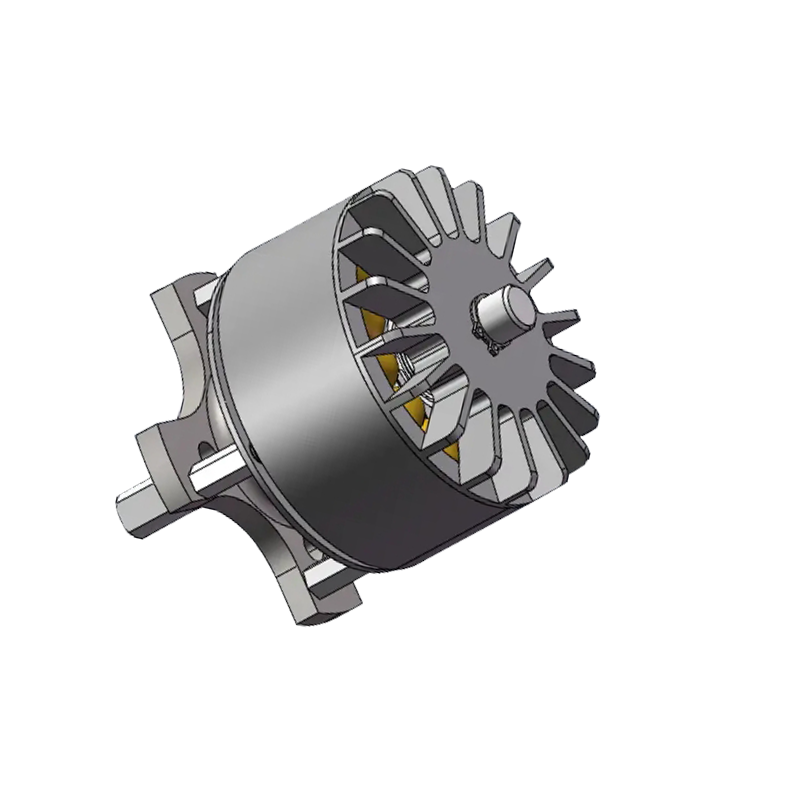
A arquitetura interna de um motor DC varia entre designs com e sem escova, mas vários componentes principais são comuns em ambos os tipos.
O estator é o conjunto externo estacionário do motor. Em motores CC pequenos e de potência fracionária, o campo do estator é produzido por ímãs permanentes fixados no furo interno da carcaça do motor. Em motores CC industriais maiores, o estator carrega enrolamentos de campo – bobinas de fio enroladas em torno de peças polares – através das quais uma corrente de excitação CC separada flui para criar o campo magnético. A estrutura do estator é normalmente de aço silício laminado para minimizar as perdas por correntes parasitas.
O rotor é o conjunto giratório montado no eixo do motor. Consiste em um núcleo de ferro laminado com ranhuras usinadas em sua circunferência, nas quais são enrolados os enrolamentos da armadura. A construção laminada reduz as perdas por correntes parasitas no ferro. Nos motores CC escovados, o rotor carrega as bobinas enroladas; em motores CC sem escovas, o rotor carrega os ímãs permanentes.
O comutador é um anel de cobre segmentado montado no eixo do rotor. Cada segmento se conecta a uma bobina de armadura diferente. Escovas de carvão — contatos acionados por mola montados na carcaça do estator — pressionam contra a superfície do comutador e mantêm contato elétrico enquanto o eixo gira. À medida que o rotor gira, os segmentos do comutador passam sob as escovas em sequência, mudando automaticamente a direção da corrente em cada bobina no momento certo para manter o torque atuando em uma direção rotacional consistente. Esta comutação mecânica é o que define um motor DC com escovas.
Os enrolamentos da armadura são condutores de cobre isolados enrolados nas ranhuras do rotor. A configuração do enrolamento – volta, onda ou simplex – determina o número de caminhos de corrente paralelos através da armadura e afeta as características de velocidade-torque do motor. Os enrolamentos de campo no estator, quando presentes, são enrolados para produzir o número correto de pólos magnéticos para a velocidade projetada e a faixa de torque.
O eixo de saída transmite torque mecânico à carga. Rolamentos de esferas de precisão ou mancais de deslizamento suportam o eixo em cada extremidade da carcaça, mantendo o entreferro entre o rotor e o estator dentro de tolerâncias restritas. A caixa (sinos finais e estrutura) fornece suporte estrutural, protege os componentes internos e, em alguns projetos, incorpora aletas de resfriamento ou disposições de montagem para um ventilador externo.
Em um motor de corrente contínua com escovas, o comutador e as escovas executam mecanicamente a função de comutação de corrente. À medida que a armadura gira, os segmentos do comutador passam pelos contatos estacionários das escovas, conectando cada bobina da armadura à alimentação em sequência. Isso garante que, independentemente da posição do rotor, a bobina atualmente alinhada com a lacuna entre os pólos do estator sempre transporte corrente na direção correta para produzir torque direto.
O resultado é um motor que funciona diretamente a partir de uma fonte CC, sem necessidade de comutação eletrônica externa. Conecte um motor CC escovado a uma bateria ou fonte CC regulada e ele girará imediatamente. Inverta a polaridade e ela inverte a direção. Essa simplicidade é a principal razão pela qual os motores com escovas continuam sendo amplamente utilizados em aplicações sensíveis ao custo e de baixa a média complexidade.
O contato mecânico entre as escovas e o comutador apresenta as principais limitações do motor. O atrito escova-comutador gera calor e detritos de desgaste, e o arco que ocorre quando os segmentos trocam produz interferência eletromagnética (EMI). A substituição da escova normalmente é necessária a cada 1.000–5.000 horas de operação dependendo da carga atual, velocidade e ambiente operacional. A superfície do comutador também requer inspeção e recapeamento periódicos.
Os motores CC com escovas não são adequados para uso em atmosferas inflamáveis ou explosivas porque o arco voltaico das escovas pode inflamar os gases circundantes. Eles também são limitados em velocidade máxima pelas restrições mecânicas do contato escova-comutador, normalmente atingindo o máximo em 3.000–8.000 RPM na maioria dos designs.

Um motor DC sem escovas (BLDC) elimina totalmente o comutador e o conjunto de escovas, realocando os ímãs permanentes para o rotor e os enrolamentos para o estator. A comutação de corrente – comutação – é feita eletronicamente por um controlador de motor que monitora a posição do rotor através de sensores de efeito Hall ou detecção de EMF traseiro e energiza as bobinas do estator na sequência correta para sustentar a rotação.
Essa inversão arquitetônica tem consequências significativas no desempenho, na manutenção e na gama de aplicações.
| Característica | Motor CC escovado | Motor CC sem escova |
|---|---|---|
| Método de comutação | Mecânico (comutador de escovas) | Eletrônico (sensores do controlador) |
| Eficiência | 75–85% | 85–95% |
| Manutenção | É necessária a substituição regular da escova | Mínimo – apenas rolamentos |
| Faixa de velocidade | Até ~8.000 RPM típico | Até 100.000 RPM possíveis |
| EMI/arco | Arco de pincel significativo | Baixo (sem contato com a escova) |
| Adequação para ambientes perigosos | Não adequado (arco de escova) | Adequado (sem arco) |
| Requisito do controlador | Controle simples de tensão DC | É necessário um controlador eletrônico dedicado |
| Custo unitário | Inferior | Superior (controlador do motor) |
| Vida útil | Limitado pelo desgaste da escova | Mais tempo – sem peças de contato desgastadas |
A vantagem de eficiência dos motores sem escovas é particularmente significativa em aplicações alimentadas por bateria. Um sistema de transmissão de veículo elétrico ou uma ferramenta elétrica operando um motor BLDC com eficiência de 92% versus um equivalente escovado com 80% se traduz diretamente em maior tempo de funcionamento por carga e carga térmica reduzida na bateria. Este é o principal fator por trás da mudança quase universal para motores sem escovas em ferramentas elétricas sem fio, veículos elétricos, drones e sistemas HVAC nas últimas duas décadas.
Apesar das vantagens de desempenho dos projetos sem escovas, os motores CC com escovas continuam sendo a escolha correta em diversas categorias de aplicação.
Um acionamento de motor CC (também chamado de acionamento CC ou controlador CC) é o pacote eletrônico de potência que regula a tensão e a corrente fornecidas a um motor CC para controlar sua velocidade, torque, aceleração e direção. O motor e o inversor juntos formam um sistema completo de controle de movimento – o motor fornece saída mecânica e o inversor gerencia a entrada elétrica para atingir o perfil de movimento desejado.
Os inversores CC escovados tradicionais usam controle de fase com tiristor (SCR) ou técnicas PWM (modulação por largura de pulso) para regular a tensão da armadura. Um drive de quatro quadrantes pode controlar a velocidade e o torque em ambas as direções de rotação, permitindo a frenagem regenerativa – onde o motor atua como um gerador durante a desaceleração, devolvendo energia ao barramento de alimentação. Esse recurso é amplamente utilizado em aplicações industriais, como bobinadeiras, laminadores e talhas, onde a desaceleração controlada e a recuperação de energia são importantes.
A precisão da regulação de velocidade de um inversor CC com escovas de malha fechada com um sinal de realimentação do tacômetro é normalmente ±0,1% da velocidade definida , o que explica seu longo domínio no controle de movimento industrial de precisão antes do amadurecimento dos inversores de frequência CA na década de 1990.
Um controlador de motor BLDC realiza comutação eletrônica lendo a posição do rotor - por meio de sensores de efeito Hall incorporados no motor ou por meio de estimativa de back-EMF sem sensor - e comutando a corrente através das fases do estator na sequência correta. O controlador também gerencia o ciclo de trabalho PWM para regular a velocidade e monitora a corrente para limitar o torque. Os inversores BLDC mais sofisticados implementam controle orientado ao campo (FOC), que otimiza o ângulo entre o campo do estator e o ímã do rotor para obter torque máximo por ampere em toda a faixa de velocidade.
Em sistemas de movimento integrados – como juntas de robôs, eixos servo e fusos CNC – o motor BLDC e seu acionamento são normalmente emparelhados e ajustados como um conjunto combinado. Os parâmetros do inversor, incluindo largura de banda do circuito de corrente, ganho do circuito de velocidade e tempo de comutação, são configurados durante o comissionamento e armazenados na memória não volátil do inversor.
O cenário de aplicação para motores CC com e sem escovas reflete seus respectivos pontos fortes em custo, manutenção, faixa de velocidade e precisão de controle.
1. Introdução: Desconstruindo a potência do motor de indução CA O motor de indução AC é um dos m...
LEIA MAIS1. Introdução Na automação industrial moderna, construção de data centers, atualização de eletrônicos de consumo...
LEIA MAISOs motores de passo representam a base do controle de movimento moderno, oferecendo posicionamento e re...
LEIA MAISO panorama motorizado industrial está passando por uma transformação significativa, impulsionada pela implacável ...
LEIA MAISProdutos Relacionados
Edifício 10, No.199, Jinfeng Road, Suzhou High-tech, província de Jiangsu, China
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Direitos autorais © Tecnologia elétrica Co. de Suzhou Retek, Ltd. Todos os direitos reservados. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers


 - Motor UAV de alta potência com impulso de 5kg")










